단순 조화 운동과 강제 진동
(1) 용수철 상수 결정
* 키보드 샘플링을
통하여 용수철 상수를 측정하였습니다. 키보드 샘플링으로 측정된, 힘(N, 중력힘)과 용수철의 늘어난 길이의 관계(힘 / 늘어난 길이 = 용수철상수)로 값을 구하였습니다.
* 측정 시 항상 정확한
값이 나오지 않았기 때문에 측정된 결과 그래프를 선형화하여 평균값을 취하였습니다.
* 단순 조화 운동의 측정값과 실제 이론 값의 비교를 하기 위해 측정한 용수철 상수를 바탕으로 질량이 50g인 추의 경우의 이론상 주기와 진동수를 구하였습니다.
(2) 단순 조화 운동
* 실제 측정한 50g 추의 진동 주기는 0.8718초 이었고, 이론상 주기는 0.852초 이었습니다. 약간의 오차(0.0198초, 상대
오차 : 약2.32%)가 발생하였지만, 거의 흡사한 값을 얻을 수 있었습니다.
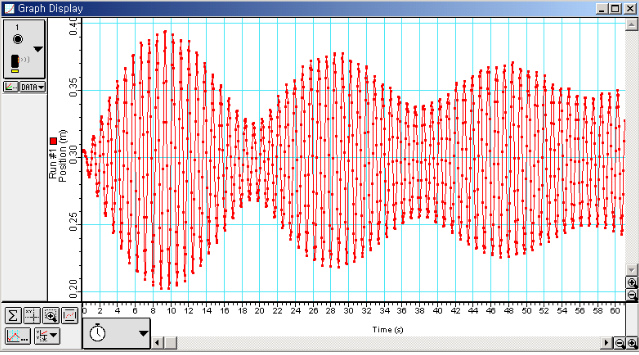
(2) 강제 진동
* 구동주파수가 자연진동수와
약간 차이가 나는 경우 : 예상한 형태의 그래프(실험 스팩에
나온 그래프)와는 결과 그래프가 약간의 차이가 있었지만, 전체적으로
수렴과 발산을 반복하며 sin곡선의 형태를 띠는 모습은 매우 유사하였습니다.
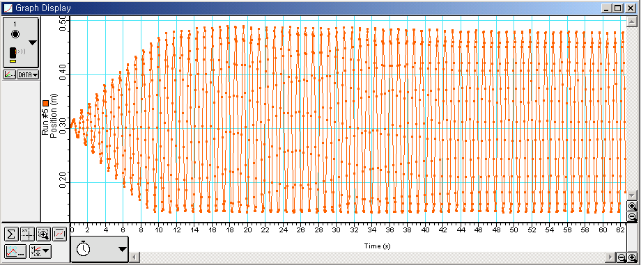
* 구동주파수가 자연진동수와
거의 일치할 때 : 예상한 형태의 그래프와 결과 그래프 또한 약간의 차이가 있었지만, 전체적으로 한 번 발산한 그래프가 다시 수렴하지 않는 다는 점에서 유사하였습니다.
* 강제 진동에서의
추가 실험 정보
실험 정보 (전압 진폭 : 5V, 주파수
(1)번 : 1.100hz, (2)번 : 1.150hz)
[용수철 상수 측정]
a. 용수철의 흔들림 : 용수철 상수를 측정할 때에 미세하지만, 추에 작은 흔들림이 지속적으로 있었습니다. 그래프에서도 볼 수 있듯이 용수철 상수의 늘어난 길이(m)값이 추가 추가되는 부분에서 약간의 어긋남을 알 수 있습니다. 이 이유는 아마도 측정시 추에 미세한 흔들림에 의한 것으로 생각됩니다. 그러한 이유로 그래프를 선형화하여 평균값을 사용하였습니다.
[단순 조화 운동 / 강제 진동 공통]
b. 모션 센서를 벗어나는 경우 : 실제 보고서에 기록한 값에는 이러한 오차가 반영되지 않았지만, 실험 중에 발생하였던 오차였습니다. 특히 강제 진동 측정 시에 주파수가 강해지면서 추의 흔들림이 매우 심한 경우가 발생하였습니다. 이러한 진동의 강도를 견디지 못하고, 추가 모션 센서가 측정 가능한 범위를 벗어나는 경우가 종종 발생하였습니다.
c. 모션 센서의 감지 오차 : 실험 시에 진동 추걸이가 상하 운동을 합니다. 사실 정확한 측정값을 얻기 위해서 추는 반듯한 형태로 위아래로 움직여야 합니다. 즉, 추가 기울어지거나 지면과 정확하게 수직 상태가 되어야만 합니다. 그런데 실제 진동 추걸이가 상하 운동을 하면서 그 운동의 영향으로 지면과의 수직 상태를 유지하지 못하고, 기울어진 형태를 띠게 됩니다. 즉, 모션 센서가 진동 추걸이와의 거리를 측정하는 거리가 추걸이의 기울어짐에 의해서 순간적으로 변하게 됩니다. 이러한 이유로 오차가 발생하지 않았을까 추측합니다. 왼쪽 그림을 참조해주세요.
[강제 진동]
d. 파형 구동자에 의한 떨림 : 파형 구동자로 강제 진동을 실험 시에 주파수가 상승함에 따라 테이블에 약간의 떨림이 있었습니다. 이로 인해 측정 값에 약간의 오차가 있었을 것으로 추정합니다. 좀 더 고정된 장소에서 실험을 하면 더 정확한 측정값을 얻을 수 있으리라 생각됩니다.